Overview
An obstacle-avoiding, path-finding AI system using Elman Recurrent Neural Networks and lidar-based input simulation.
This project focuses on solving the classic problem of obstacle avoidance and path planning for autonomous mobile robots using Recurrent Neural Networks (RNNs). We implemented a simple Elman RNN architecture that uses lidar-based simulated sensor data to train the robot on how to navigate through a grid environment containing obstacles.
Highlights
- 182 total input features: 180 lidar sensor values + 2 positional values
- Custom Elman RNN with feedback loop on the third hidden layer
- Softmax-based decision making: Forward, Backward, Left, Right
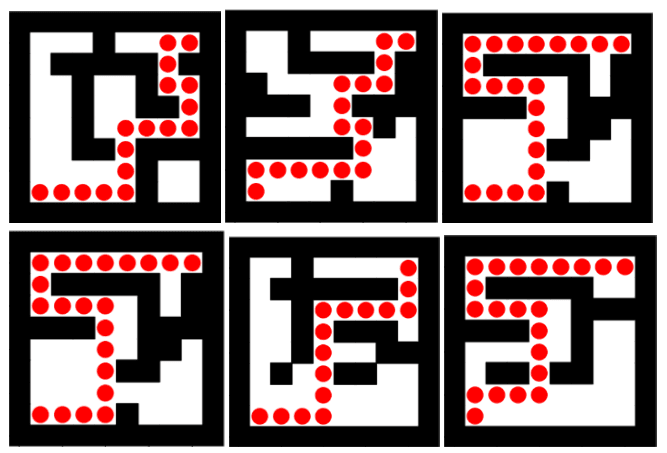
- Dynamic training set generated from map and path planning samples
- Trained using backpropagation with a cost function based on log-probability
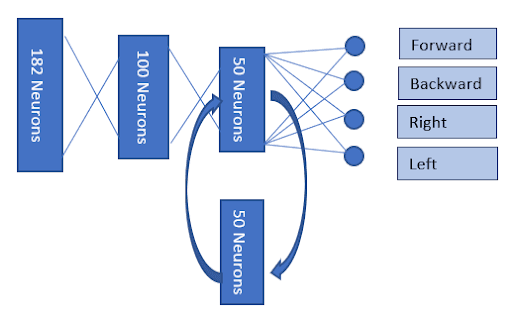
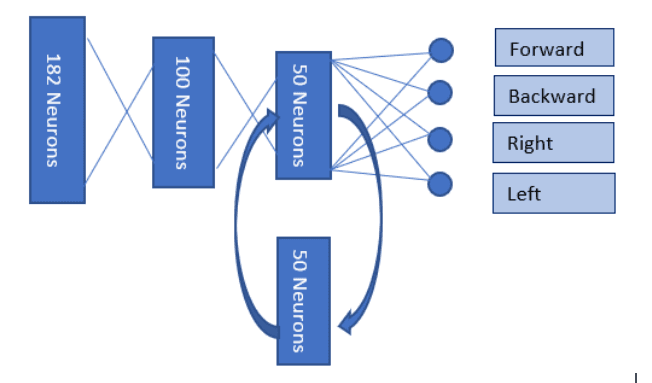
Architecture
- Input Layer: 182 neurons
- Hidden Layer 1: 100 neurons (sigmoid)
- Hidden Layer 2: 50 neurons (ReLU with Elman recurrent memory)
- Output Layer: 4 neurons (softmax decision)
The RNN layer is implemented by connecting the third layer with its past state using a hidden state update. The network is trained across 200 iterations on a dataset generated using simulated maps and paths.
Key Code Snippets
1. Simulating Lidar Sensor Readings
def lidarValues(Position, mapArray):
lidarRange = 360
distanceMatrix = []
startangle = 0
for theeta in range(0, lidarRange, 2):
angle = startangle + theeta
distanceMatrix.append(distance(Position, angle, mapArray))
return distanceMatrix2. Generating Training Data
def createTrainingSet(mapArray, Forward_path, initialPosition):
Xx, Yy = [], []
for m in range(len(Forward_path)):
Xx.append([])
Yy.append([])
curr_position = initialPosition
for i in range(len(Forward_path[m])):
l_values = lidarValues(curr_position, mapArray[m])
Xx[m].append(l_values + curr_position)
Y = decode_Output(Forward_path[m][i])
Yy[m].append(Y)
curr_position = nextPosition(curr_position, Y)
return Xx, Yy3. Elman Network Forward Path
def L_model_forward(X, R_prev, parameters, nn_architecture):
forward_cache = {}
A = X
number_of_layers = len(nn_architecture)
forward_cache['A0'] = A
for l in range(1, number_of_layers):
A_prev = A
W, b = parameters['W'+str(l)], parameters['b'+str(l)]
activation = nn_architecture[l]['activation']
if l == RNN_layer:
U = parameters['U'+str(l)]
Z, A = linear_activation_forward(A_prev, W, b, activation, U, R_prev)
else:
Z, A = linear_activation_forward(A_prev, W, b, activation)
forward_cache['Z'+str(l)] = Z
forward_cache['A'+str(l)] = A
AL = softmax(A)
return AL, forward_cache4. Training the Network
trained_parameters = L_layer_model(
Xx, Yy, nn_architecture, RNN_layer,
learning_rate=0.0075,
num_iterations=200,
print_cost=True
)5. Testing on Maps
for maps in mapArray:
testMapPlotValues(initialPosition, trained_parameters, nn_architecture, maps)
plot.show()This approach shows the potential of using simple RNNs for embedded AI in pathfinding problems, especially in structured indoor navigation scenarios.
Project Articles
Building a neural net that learns to navigate using lidar input and Elman-style memory.
Using synthetic lidar data to train a mobile robot for neural-based decision making.